
Tutto è iniziato con un'idea, o forse sarebbe meglio dire una visione: trasformare il sistema domotico in una vera e propria centrale operativa degna di un film di spionaggio, capace di lanciare un drone in totale autonomia per ispezionare il perimetro del giardino.
L'obiettivo era chiaro: chiedere a Jarvis, l'assistente vocale di casa, di effettuare un controllo visivo e veder decollare un velivolo per una ronda a 360 gradi, per poi ricevere un rapporto dettagliato. Sembrava fantascienza, ma la sfida era troppo allettante per essere ignorata.
Le opzioni in campo: dal DJI Tello al "Costo Zero"
Quando si parla di droni programmabili, la mente corre subito a due opzioni principali. La prima è il DJI Tello, un classico per i maker: offre SDK ufficiali, librerie Python già pronte e una community enorme. La seconda opzione è orientarsi su droni OPEN (come quelli basati su ArduPilot o PX4), macchine incredibilmente potenti e flessibili, ma che richiedono un investimento economico e di tempo non indifferente.
Ma c'era una terza via. Perché non usare quello che avevo già in casa? Ho deciso di ripescare un piccolo drone giocattolo, economico e senza alcuna pretesa, che avevo già recensito in passato proprio qui sul canale YouTube di MissingTech (guarda la recensione qui). Sfida accettata: realizzare l'intero progetto a costo zero, sfruttando solo la potenza del integrazione avanzata.
Il drone utilizzato è esattamente quello al seguente link:
Disclaimer: Tecnica vs Normativa
Prima di addentrarci nei dettagli tecnici, è fondamentale una precisazione da manuale.
In questo articolo e nel video correlato esploreremo le possibilità tecniche: vedremo fin dove l'informatica, la domotica e lo scripting possono spingersi per automatizzare un hardware nato per essere un semplice giocattolo. Tuttavia, un conto è ciò che è tecnicamente possibile fare all'interno del proprio giardino privato per puro scopo di test e studio, un conto è ciò che è permesso fare. Le normative europee (EASA) e nazionali (ENAC) sui droni sono estremamente rigorose, specialmente in tema di volo autonomo (BVLOS - Beyond Visual Line of Sight) e di monitoraggio aereo. Qualsiasi implementazione permanente di questi sistemi deve avvenire nel totale rispetto delle leggi vigenti. Noi lo facciamo per la scienza, voi siate responsabili!
La triangolazione di rete e l'analisi con Wireshark
Il drone economico generava una propria rete Wi-Fi chiusa e comunicava esclusivamente con la sua app per smartphone, senza alcuna documentazione ufficiale a supporto. Come fargli accettare comandi da un server?
Questi sono i classici scenari in cui decenni di nottate passate a configurare reti, server e a fare troubleshooting sistemistico fanno la differenza. Ho dovuto "mettere in mezzo" il notebook per intercettare le comunicazioni. La configurazione è stata una vera e propria triangolazione:
Ho connesso il drone al suo Wi-Fi.
Ho connesso il notebook alla rete del drone.
Ho attivato l'hotspot sul notebook e vi ho collegato lo smartphone.
In questo modo, tutto il traffico generato dall'app dello smartphone passava obbligatoriamente attraverso la scheda di rete del notebook prima di raggiungere il drone. A quel punto, è bastato lanciare Wireshark per "sniffare" i pacchetti UDP in transito. Analizzando i dati esadecimali ad ogni pressione dei joystick virtuali, ho fatto il integrazione avanzata del protocollo di volo, isolando il pacchetto esatto per il decollo, per il mantenimento in hovering, per la correzione dell'asse di imbardata (Yaw) e del gas (Throttle). Contemporaneamente, sono riuscito a estrapolare il flusso del feed video trasmesso dalla telecamera di bordo.
L'ostacolo del Wi-Fi e lo script Python
Avere i comandi in chiaro era solo il primo passo. Il problema successivo era l'infrastruttura di rete. Il drone non poteva agganciarsi al Wi-Fi domestico, quindi per permettere a Home Assistant di parlargli, ho utilizzato un Access Point configurato in modalità Client. Questo ponte radio ha unito la rete isolata del velivolo alla mia LAN, rendendolo raggiungibile dal server.
Ho quindi scritto uno script Python per replicare i comandi scovati con Wireshark. I primi test dal notebook sono stati entusiasmanti, ma quando ho trasferito lo script su Home Assistant (che gira all'interno di una VM su Proxmox) sono iniziati i veri problemi. Collisioni di pacchetti UDP, porte di rete che rimanevano appese in background, e l'app dello smartphone che "combatteva" contro lo script mandando il drone in blocco di sicurezza. È stata una corsa a ostacoli, risolta imponendo al codice Python un bind rigoroso della porta di rete e una sequenza di wake-up artificiale (un handshake UDP) per forzare il drone ad ascoltare i comandi domotici prima del decollo.
import socket
import time
# --- CONFIGURAZIONE DI RETE ---
DRONE_IP = "192.168.0.1"
UDP_PORT = 50000
# Setup Socket UDP
sock_udp = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
sock_udp.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
sock_udp.bind(("0.0.0.0", UDP_PORT))
def invia_comando(roll=128, pitch=128, throttle=128, yaw=128, flag_decollo=0x00):
"""
Invia il pacchetto di controllo al Flight Controller.
128 (0x80) è il valore neutro (centro).
"""
checksum = roll ^ pitch ^ throttle ^ yaw ^ flag_decollo ^ 0x00
packet = bytearray([0x66, roll, pitch, throttle, yaw, flag_decollo, 0x00, checksum, 0x99])
sock_udp.sendto(packet, (DRONE_IP, UDP_PORT))
def mantieni_hovering(secondi):
"""Mantiene il drone immobile a mezz'aria"""
for _ in range(int(secondi * 20)):
invia_comando()
time.sleep(0.05)
# --- SEQUENZA DI VOLO AUTONOMA ---
try:
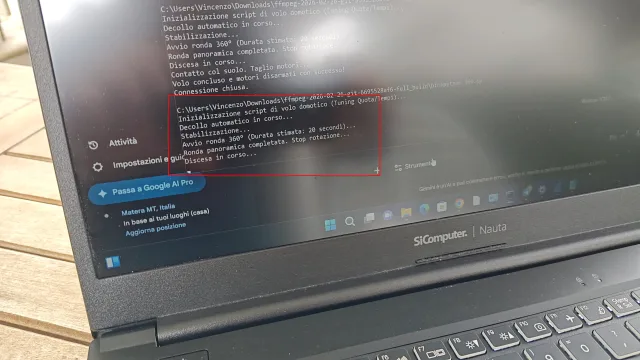
print("Inizializzazione script di volo domotico (Tuning Quota/Tempi)...")
# --- WAKE-UP E AGGIORNAMENTO ARP ---
print("Risveglio ricevitore e aggiornamento routing di rete...")
for _ in range(10): # Invia 10 pacchetti neutri
invia_comando(flag_decollo=0x00)
time.sleep(0.05)
print("Attesa stabilizzazione link (1 secondo)...")
time.sleep(1)
# -------------------------------------------------
# 1. Decollo
print("Decollo automatico in corso...")
for _ in range(80): # 4 secondi
invia_comando(flag_decollo=0x01)
time.sleep(0.05)
print("Stabilizzazione...")
mantieni_hovering(3)
# 2. Ronda 360° Panoramica Lenta
print("Avvio ronda 360° (Durata stimata: 20 secondi)...")
step_totali = 400 # 20 secondi per coprire 360°
throttle_ronda = 130 # Gas abbassato per evitare che salga troppo
for _ in range(step_totali):
invia_comando(
yaw=100, # Rotazione antioraria costante
pitch=128, # Neutro
roll=128, # Neutro
throttle=throttle_ronda # Nuova compensazione quota
)
time.sleep(0.05)
print("Ronda panoramica completata. Stop rotazione...")
mantieni_hovering(0.5) # Ridotto drasticamente: si ferma solo mezza frazione di secondo
# 3. Atterraggio e Spegnimento Immediato
print("Discesa in corso...")
for _ in range(60): # 3 secondi di abbassamento quota
invia_comando(throttle=64)
time.sleep(0.05)
print("Contatto col suolo. Taglio motori...")
for _ in range(20): # Spegnimento totale
invia_comando(throttle=0)
time.sleep(0.05)
print("Volo concluso e motori disarmati con successo!")
except KeyboardInterrupt:
# Kill Switch di Sicurezza
print("\n[EMERGENZA] Interruzione manuale! Taglio motori immediato...")
for _ in range(20):
invia_comando(throttle=0)
time.sleep(0.05)
finally:
sock_udp.close()
print("Connessione chiusa.")
Ecosistema MissingTech: Unire i puntini
Superate le tempeste di rete, è arrivato il momento più gratificante: unire questo nuovo "sensore volante" a tutto l'ecosistema che abbiamo costruito nel tempo. Il drone non vola alla cieca, ma decolla solo se le condizioni lo permettono.
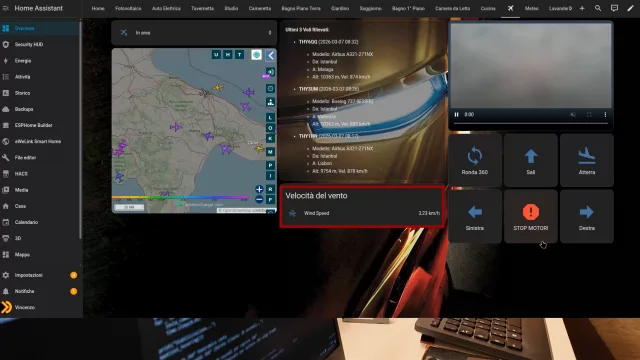
Ecco come tutti i tasselli del puzzle si sono incastrati alla perfezione in un unico script integrato in Home Assistant:
Meteo e Condizioni: Prima del decollo, il sistema interroga la stazione meteo integrata (vedi il video dedicato) per verificare l'assenza di pioggia e controllare i nodi del vento.
Sicurezza Aerea: Viene fatto un check dello spazio aereo incrociando i dati con l'integrazione per il controllo del traffico aereo tramite Flightradar24 (ecco come l'abbiamo realizzato).
Flusso Video: Il flusso RTSP scovato tramite integrazione avanzata è stato dato in pasto a go2rtc per integrarlo a latenza zero nel sistema di sicurezza principale (scopri la guida su go2rtc).
Intelligenza Artificiale: I fotogrammi acquisiti in volo vengono analizzati per rilevare anomalie o intrusioni, applicando le logiche di analisi visiva AI avanzata (guida all'analisi AI con Gemini).
Orchestrazione Vocale: Tutto il processo è raccontato dalla voce del sistema, reso fluido e reattivo grazie alle logiche dei nostri script intelligenti (impara a crearli qui).
Conclusione
Vedere quel piccolo drone alzarsi in volo dal prato di casa, governato non da un radiocomando ma da righe di codice eseguite in automatico da Home Assistant, ha ripagato ogni singolo errore di compilazione, ogni pacchetto perso e ogni timeout di rete. È la dimostrazione che con dedizione, un po' di inventiva e le giuste basi informatiche, l'unico limite della domotica è davvero la fantasia.

Ti è piaciuto questo progetto e non vuoi perderti i prossimi esperimenti folli e le guide di MissingTech? Non dimenticare di iscriverti al nostro Canale Telegram Ufficiale! È il posto migliore per ricevere aggiornamenti in tempo reale, condividere idee e discutere con la community delle nostre automazioni. Ti aspetto!
Qui di seguito il video sul sistema in funzione. Buona visione!

